Made with 3d-printed parts, various electronics, and C++
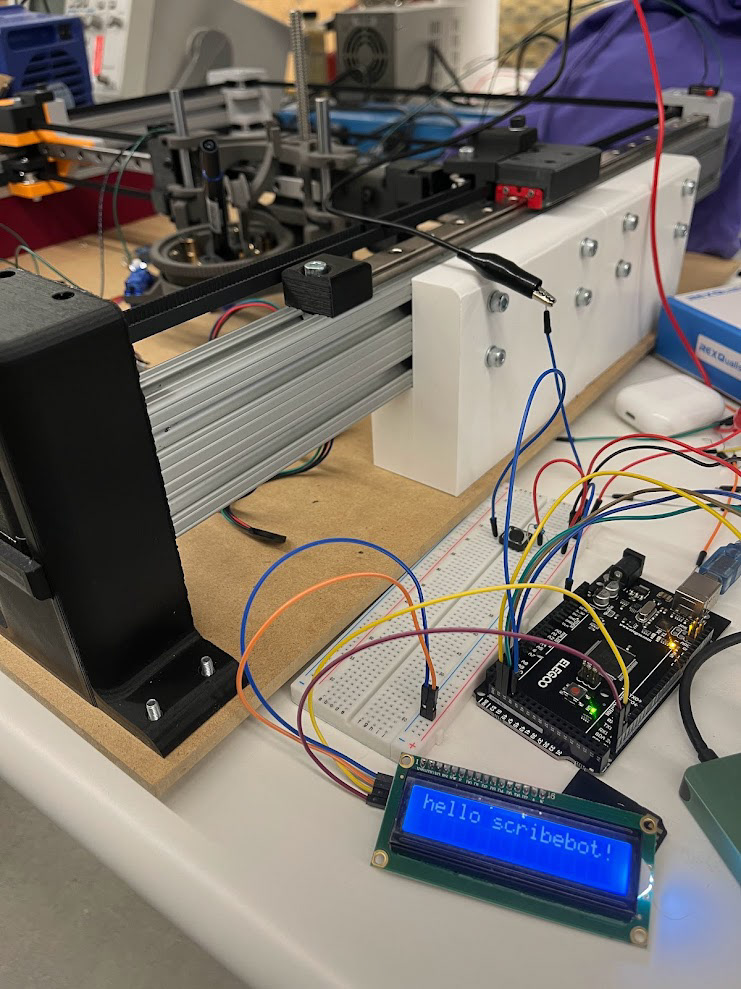
In January 2024, I made this drawing robot with partner Lee Liu! It's essentially a 5-degree-of-freedom gantry, or a traditional x/y/z pen plotter with additional roll/yaw axes added. Here's a video of it in action:
And here are some closeups of the carriage and electronics. Some technical details - we used a CoreXY gantry and a combination of NEMA 17 and ULN2003 stepper motors, and our 3d-printed parts were mostly printed with Prusas, with the exception of some carriage parts that were powder printed using the Formlabs Fuse.
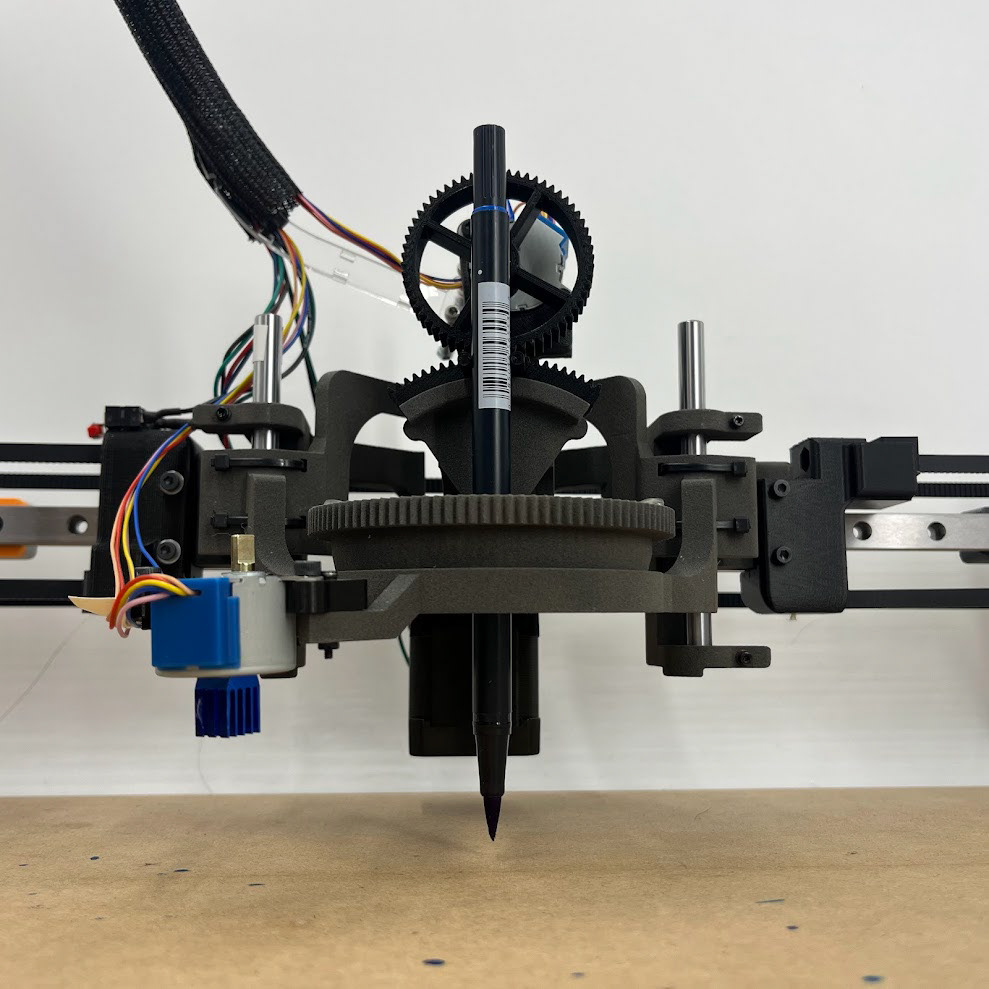
Carriage front view
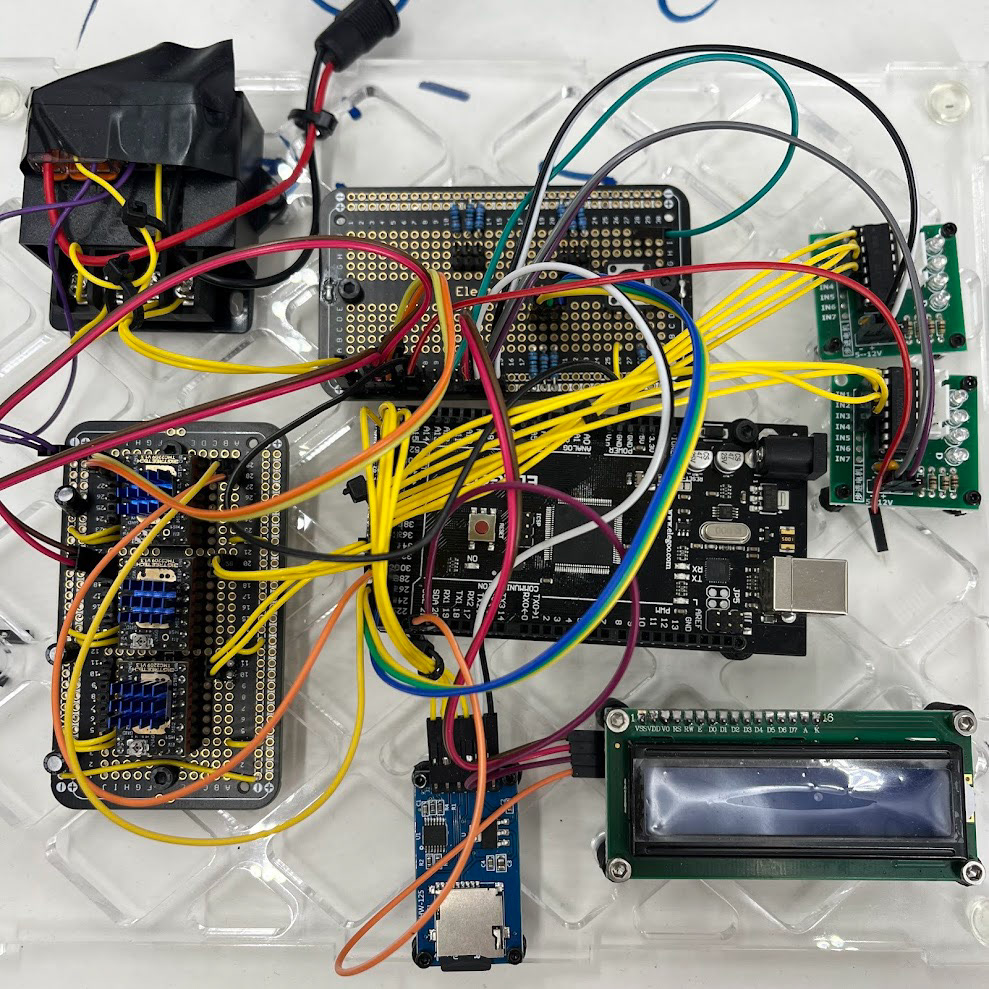
Electronics board
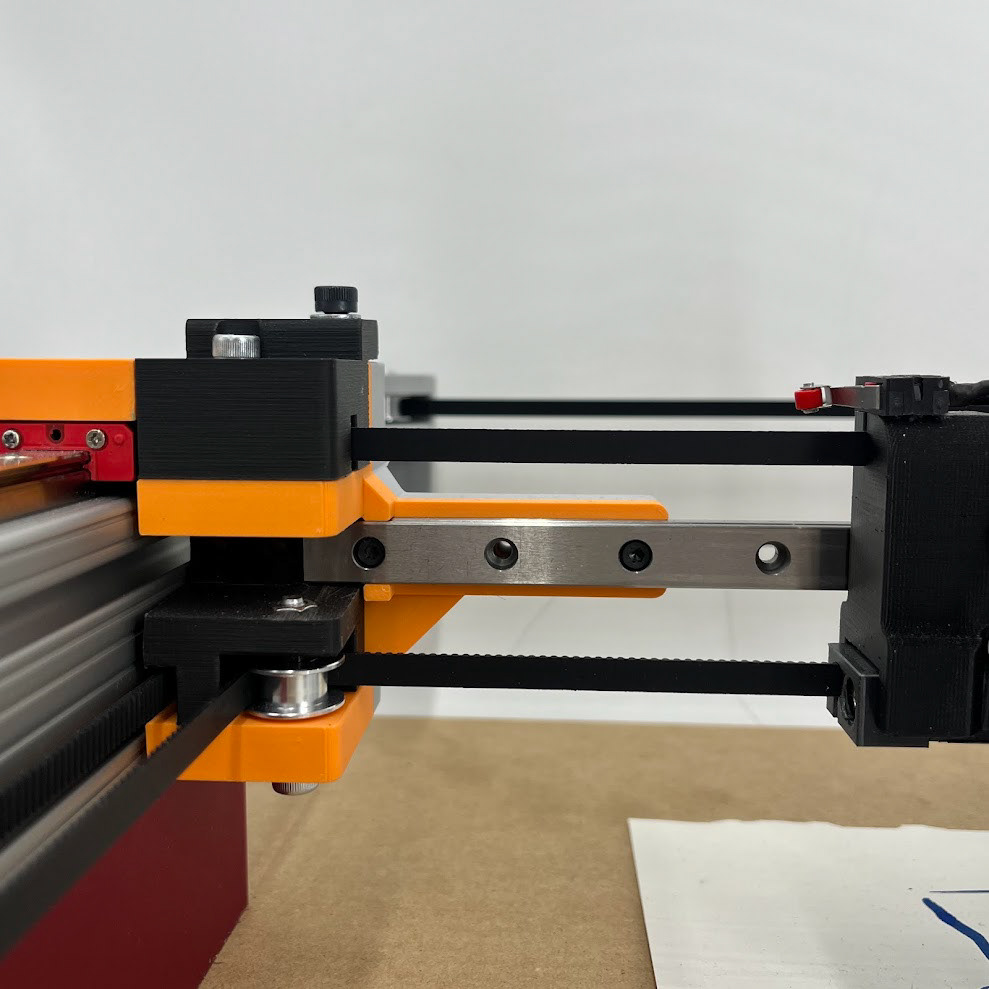
CoreXY belt mounts